Пи регулирование. Преобразователь частоты и пид-регулятор — общая настройка
В данном разделе приведены описания алгоритмов работы и непрерывных П-, ПИ-, ПД-, ПИД-регуляторов с различными структурами выходного сигнала - аналоговым выходом, дискретным (импульсным) выходом или ШИМ-выходом (широтно импульсным модулированным сигналом).
Структурные схемы непрерывных регуляторов
В данном разделе приведены структурные схемы непрерывных регуляторов с аналоговым выходом -рис.2, с импульсным выходом - рис.3 и с ШИМ (широтно импульсным модулированным) выходом -рис.4.
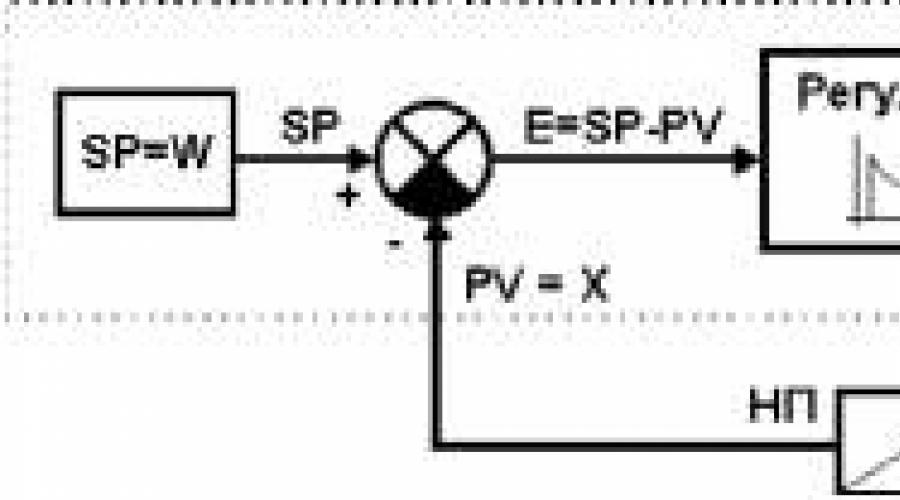
В процессе работы система автоматического регулирования АР (регулятор) сравнивает текущее значение измеряемого параметра Х, полученного от датчика Д, с заданным значением (заданием SP) и устраняет рассогласование регулирования E (B=SP-PV). Внешние возмущающие воздействия Z также устраняются регулятором. Работа приведенных структурных схем отличается методом формирования выходного управляющего сигнала регулятора.
Непрерывный регулятор с аналоговым выходом
Структурная схема непрерывного регулятора с аналоговым выходом приведена на рис.2.
Выход Y регулятора АР (например, сигнал 0-20мА, 4-20мА, 0-5мА или 0-10В) воздействует через электропневматический Е/Р сигналов (например, с выходным сигналом 20-100кПа) или электропневматический позиционный регулятор на исполнительный элемент К (регулирующий орган).

Рисунок 2 - Структурная схема регулятора с аналоговым выходом
где:
АР - непрерывный ПИД-регулятор с аналоговым выходом,
Д - датчик,
НП - нормирующий преобразователь (в современных регуляторах является входным устройством)
Y - выходной аналоговый управляющий сигнал Е/Р - электропневматический преобразователь,
Непрерывный регулятор с импульсным выходом
Структурная схема непрерывного регулятора с импульсным выходом приведена на рис.3.
Выходные управляющие сигналы регулятора - сигналы Больше и Меньше (транзистор, реле, симистор) через контактные или бесконтактные управляющие устройства (П) воздействуют на исполнительный элемент К (регулирующий орган).

Рисунок 3 - Структурная схема регулятора с импульсным выходом
где:
АР - непрерывный ПИД-регулятор с импульсным выходом,
SP - узел формирования заданной точки,
PV=X- регулируемый технологический параметр,
Е - рассогласование регулятора,
Д - датчик,
НП - нормирующий преобразователь (в современных регуляторах является входным устройством) ИМП - импульсный ШИМ модулятор, преобразующий выходной сигнал Y в последовательность импульсов со скважностью, пропорциональной выходному сигналу: Q=\Y\/100. Сигналы Больше и Меньше - управляющие воздействия,
К - клапан регулирующий (регулирующий орган).
Непрерывный регулятор с ШИМ (широтно импульсным модулированным) выходом
Структурная схема непрерывного регулятора с ШИМ (широтно импульсным модулированным) выходом приведена на рис.4.
Выходной управляющий сигнал регулятора (транзистор, реле, симистор) через контактные или бесконтактные управляющие устройства (П) воздействуют на исполнительный элемент К (регулирующий орган).
Непрерывные регуляторы с ШИМ выходом широко применяются в системах регулирования температуры, где выходной управляющий симисторный элемент (или твердотельное реле, пускатель) воздействуют на термоэлектрический нагреватель ТЭН, или вентилятор.

Рисунок 4 - Структурная схема регулятора с ШИМ выходом
АР - непрерывный ПИД-регулятор с импульсным ШИМ выходом,
SP - узел формирования заданной точки,
PV=X- регулируемый технологический параметр,
Е - рассогласование регулятора,
Д - датчик,
НП - нормирующий преобразователь (в современных регуляторах является входным устройством) ШИМ - импульсный ШИМ модулятор, преобразующий выходной сигнал Y в последовательность импульсов со скважностью, пропорциональной выходному сигналу: Q=\Y\/100.
П - пускатель контактный или бесконтактный,
К - клапан регулирующий (регулирующий орган).
Согласование выходных устройств непрерывных регуляторов
В ыходной сигнал регулятора должен быть согласован с исполнительным механизмом и исполнительным устройством.
В соответствии с видом привода и исполнительным механизмом необходимо использовать выходное устройство непрерывного регулятора соответствующего типа, см. таблицу 1.
Таблица 1 - Согласование выходных устройств непрерывных регуляторов
| Выходное устройство непрерывного регулятора | Тип выходного устройства | Исполнительный механизм или устройство | Вид привода | Регулирующий орган | |
|---|---|---|---|---|---|
| Аналоговый выход | ЦАП с выходом 0-5мА, 0-20мА, 4-20мА, 0-10В | П-, ПИ-,ПД-, ПИД-закон | Преобразователи и позиционные регуляторы электро-пневматические и гидравлические | Пневматические исполнительные приводы (с сжатым воздухом в качестве вспомогательной энергии) и электропневматические преобразователи сигналов или электропневматические позиционные регуляторы, электрические (частотные привода) | |
| Импульсный выход | Транзистор, реле, симистор | П-, ПИ-, ПД-, ПИД-закон | Электрические приводы (с редуктором), в т. ч. реверсивные | ||
| ШИМ выход | Транзистор, реле, симистор | П-, ПИ-, ПД-, ПИД-закон | Контактные (реле) и бесконтактные (симисторные) пускатели | Термоэлектрический нагреватель(ТЭН) и др. |
Реакция регулятора на единичное ступенчатое воздействие
Если на вход регулятора подается скачкообразная функция изменения заданной точки - см. рис. 5, то на выходе регулятора возникает реакция на единичное ступенчатое воздействие в соответствии с характеристикой регулятора в функции времени.
ПИД-регулятор является готовым устройством, которое позволит пользователю реализовывать программный алгоритм управления тем или иным оборудованием автоматизированной системы. Построение и настройка систем управления становится существенно проще если использовать готовые устройства наподобие универсального ПИД-регулятора ТРМ148 на 8 каналов компании Овен.
Скажем, вам нужно автоматизировать поддержание правильных климатических условий в теплице: учесть температуру почвы возле корней растений, давление воздуха, влажность воздуха и почвы, и поддерживать заданные параметры посредством управления и вентиляторами. Нет ничего проще, достаточно настроить ПИД-регулятор.
Давайте вспомним сначала, что же представляет собой ПИД-регулятор? ПИД-регулятор - это особое устройство, осуществляющее непрерывную точную регулировку выходных параметров тремя путями: пропорционально, интегрально и дифференциально, а исходные параметры - входные, получаемые с датчиков (давления, влажности, температуры, освещенности и т.д).
Входной параметр подается на вход ПИД-регулятора с датчика, допустим, с датчика влажности. Регулятор принимает величину напряжения или тока, измеряет ее, затем производит вычисления по своему алгоритму, и осуществляет в итоге подачу сигнала на соответствующий выход, в результате автоматизируемая система получает управляющее воздействие. Влажность почвы снизилась - включился на несколько секунд полив.
Цель - достигнуть заданной пользователем величины влажности. Или например: освещенность понизилась - включить над растениями фитолампы и т.д.
ПИД-регулирование
На самом деле, хотя с виду все просто, внутри регулятора математика посложнее, не в один шаг все происходит. После включения полива ПИД-регулятор снова делает замер, измеряя, насколько же изменилась теперь входная величина, - так находится ошибка регулирования. Следующее воздействие на исполнительный орган будет уже скорректировано с учетом измеренной ошибки регулирования, и так на каждом шагу управления, пока цель - заданный пользователем параметр - не будет достигнута.
Три составляющих участвуют в регулировании: пропорциональная, интегральная и дифференциальная. Каждая составляющая имеет свою степень значимости в каждой конкретной системе, и чем больший вклад вносит та или иная составляющая - тем существеннее именно она и должна быть изменена в процессе регулирования.
Пропорциональная составляющая - самая простая, чем больше изменение - тем больше коэффициент (пропорциональности в формуле), и чтобы воздействие уменьшить, достаточно просто уменьшить коэффициент (множитель).
Допустим, влажность почвы в теплице сильно ниже установленной - тогда время полива должно быть дольше во столько же раз, во сколько текущая влажность ниже установленной. Это грубый пример, но принцип в общих чертах именно таков.
Интегральная составляющая - она необходима для повышения точности управления с опорой на предыдущие события регулирования: предыдущие ошибки интегрируются, на них и делается поправка, чтобы в итоге получить нулевое отклонение при регулировании в будущем.
Наконец, дифференциальная составляющая. Здесь берется в расчет скорость изменения регулируемой величины. Плавно ли, резко ли изменяется задаваемая величина, - соответственно и регулирующее воздействие не должно приводить к чрезмерным отклонениям величины во время регулирования.
Остается выбрать прибор для ПИД-регулирования. Сегодня их на рынке много, есть многоканальные, позволяющие изменять сразу несколько параметров, как в приведенном выше примере с теплицей.
Рассмотрим устройство регулятора на примере универсального ПИД-регулятора ТРМ148 от компании Овен.
Входные восемь датчиков подают сигналы на соответствующие входы. Сигналы масштабируются, фильтруются, корректируются, их значения можно просмотреть на дисплее, произведя переключение кнопками.
Выходы прибора изготавливаются в разных модификациях в требуемых комбинациях из следующих:
реле 4 А 220 В;
транзисторные оптопары n–p–n-типа 400 мА 60 В;
симисторные оптопары 50 мА 300 В;
ЦАП «параметр–ток 4...20 мА»;
ЦАП «параметр–напряжение 0...10 В»;
выход 4...6 В 100 мА для управления твердотельным реле.
Так, управляющее воздействие может быть аналоговым или цифровым. - это импульсы изменяемой ширины, а аналоговый - в форме плавно изменяемого напряжения или тока в унифицированном диапазоне: от 0 до 10 В для напряжения, и от 4 до 20 мА - для токового сигнала.
Данные выходные сигналы как раз и служат для управления исполнительными приборами, скажем насосом системы полива или реле, включающим и выключающим ТЭН либо мотор управления задвижкой. На панели регулятора присутствуют сигнальные индикаторы.

Для взаимодействия с ПК, регулятор ТРМ148 оснащен интерфейсом RS-485, который позволяет:
- получать из сети оперативные данные для генерации управляющих сигналов.
конфигурировать прибор на ПК (программы для конфигурирования предоставляются бесплатно);
передавать в сеть текущие значения измеренных величин, выходной мощности регулятора, а также любых программируемых параметров;
Что же такое ПИД-регулятор? Прежде всего это алгоритм, который может быть реализован как программно, так и аппаратно. Сегодня мы рассмотрим ПИД-регулятор как законченное устройство, которое может быть использовано для построения систем управления и автоматики. В качестве примера возьмём устройство компании «ОВЕН» ТРМ210. Но для начала немного теории…
Что такое ПИД-регулятор?
ПИД-регулятор относится к . Аббревиатура «ПИД» расшифровывается как «пропорционально-интегрально-дифференциальный» (регулятор) — эти три слова полностью описывают принцип его действия. Общая структурная схема управления выглядит так:
На вход регулятора подаётся измеренная датчиком физическая величина (температура, влажность и т.д.), регулятор в соответствии со своим алгоритмом (реализующим функцию преобразования) выдаёт управляющее воздействие. Это вызывает изменение регулируемой величины (например, температуры или влажности). На следующем шаге регулятор снова делает замер регулируемого параметра и сравнивает эту величину с заданной, вычисляя ошибку регулирования. Новое управляющее воздействие формируется с учётом ошибки регулирования на каждом шаге. Значение величины, которое нужно поддерживать, задаётся пользователем.
Функция преобразования ПИД-регулятора выглядит следующим образом:
Где E — ошибка регулирования (разница между заданным значением регулируемой величины и фактическим)
В этой формуле, как вы уже догадались, есь три составляющие: интегральная пропорциональная и дифференциальная. Каждая из них имеет соответствующий коэффициент (Кп, Ки, Кд). Чем больше коэффициент, тем больший вклад данная составляющая вносит в работу регулятора. Теперь разберёмся за что отвечает каждая из них.
Пропорциональная: «Чем больше — тем больше, чем меньше — тем меньше»
Тут всё просто. Пропорциональная составляющая просто умножает величину ошибки на свой коэффициент. Например, чем больше заданная температура по сравнению с текущей, тем большую мощность регулятор установит на обогревателе.
Интегральная: «Учтём предыдущий опыт»
Интегральная составляющая необходима, чтобы учитывать предыдущий опыт работы регулятора и делать управление всё точнее и точнее со временем. Как известно, интеграл — это сумма. Регулятор суммирует все предыдущие значения ошибки регулирования и делает на них поправку. Как только система выйдет на заданный режим (например, достигнет заданной температуры) ошибка регулирования будет близка к нулю и интегральная часть со временем будет всё меньше влиять на работу регулятора. Говоря простым языком, интегральная составляющая стремиться исправить ошибки регулирования за предыдущий период.
Дифферинциальная: «Учтём скорость изменения»
Эта составляющая берёт производную от измеряемой величины. Физический смысл производной- это скорость изменения физической величины. Например, чем быстрее растёт (или падает) температура в системе, тем больше будет соответствующая производная. Дифферинциальная составляющая позволяет регулятору по-разному реагировать на резкие и плавные изменения регулируемой величины в системе, тем самым избегая «раскачивания» этой величины.
ТРМ210: Функциональная схема прибора
Краткий экскурс в теорию закончен, вернёмся к практике и рассмотрим прибор ТРМ210, реализующий данный алгоритм.

Вот его функциональная схема:
 Информация с датчика преобразуется прибором с помощью шкалы масштабирования, проходит фильтрацию и коррекцию. Это необходимо, чтоб ПИД-алгоритм получил измеренное значение в удобном и понятном для него виде.
Информация с датчика преобразуется прибором с помощью шкалы масштабирования, проходит фильтрацию и коррекцию. Это необходимо, чтоб ПИД-алгоритм получил измеренное значение в удобном и понятном для него виде.
Значение измеренной величины отображается на дисплее прибора.
Управляющее воздействие регулятора может быть импульсным или аналоговым. В первом случае управляющее воздействие регулятора заключается в изменении ширины генерируемых на выходе импульсов. Во втором случае регулятор выдаёт сигнал унифицированного напряжения в диапазоне 0…10 В или тока в диапазоне 4…20 мА. С помощью этих сигналов можно управлять практически любым устройством.
В ТРМ210 предусмотрен блок сигнализации, который сообщает о выходе физической величины за заданные пределы, замыкая дискретный выход, который, например, может «зажигать» лампу «Авария».
Также в приборе имеется блок регистратора, который может передавать измеренное значение физической величины любому другому прибору или устройству с помощью токового сигнала 4…20 мА.
В дополнение ко всему выше перечисленному регулятор имеет «на борту» интерфейс RS-485, который позволяет читать с прибора значения измеряемой величины, выходной мощности регулятора и любых конфигурируемых параметров. Это может пригодиться, если нужно передавать информацию о работе прибора в диспетчерский пункт.
Пример использования
Допустим, необходимо реализовать проветривание помещения следующим образом: чем больше температура внутри, тем больше нужно открыть окно. Для этого установим на окно привод, который будет плавно поворачиваться на заданный угол, а управляться будет сигналом тока 4…20 мА (такой управляющий сигнал поддерживают практически все подобные приводы). То есть, если подать на привод сигнал 4 мА — он полностью закроет окно, а 20 мА — полностью его откроет.
Для измерения температуры можно взять любой из поддерживаемых ТРМ210 — это практически любые термопары и любые датчики имеющие унифицированные выходы 0…10 В и 4…20 мА.
Настройка ПИД-регулятора
Прибор ТРМ210 имеет функцию автонастройки. В этом режиме регулятор сам имитирует возмущающие воздействия, отслеживает реакцию системы и исходя из этих данных подстраивает свои коэффициенты. Однако, таким способом настроить регулятор получается далеко не всегда, поскольку регулятор ничего не знает о реальной системе, и генерируемые им тестовые возмущения могут не совпадать с реальными возмущениями, возникающими в этой системе. В таких случаях необходимо подобрать коэффициенты вручную. О том, как это правильно сделать мы расскажем в .
До свидания! Читайте LAZY SMART .
Общие сведения
Обычно, при использовании пропорционально-интегрально-дифференциального или ПИД- (PID- Proportional-Integral-Derivative) регулятора и грамотной его настройке, достигается лучшая точность управления по сравнению с двухпозиционным (релейным) регулятором. Но для оптимальной настройки регулятора и, как следствие, получение желаемого качества управления, необходимо понимание механизмов и принципов работы ПИД-регулятора.
При ПИД-регулировании сигнал управления зависит не только от разницы между текущим и заданным значением (величины ошибки или рассогласования), а также от накопленной ошибки (интеграла) и от скорости изменения ошибки во времени (дифференциала). В результате ПИД-регулятор обеспечивает такое значение сигнала управления, при котором ошибка в установившемся режиме стремится к нулю. Качество управления определяется многими факторами, ключевыми являются недетерминированность объекта управления, точность ввода-вывода регулятора и интенсивность внешних воздействий.
Где:
Xp - полоса пропорциональности
Ei = (SP-PV) = (уставка-тек) = ошибка (рассогласование)
Тд - постоянная времени дифференцирования
∆Ei - разность ошибок соседних измерений (Ei - Ei-1)
∆tизм - время между соседними измерениями (ti - t i-1)
Ти - постоянная времени интегрирования
- Накопленная к i-ому шагу сумма рассогласований (интегральная сумма)
Легко заметить, что сигнал управления является суммой трех составляющих: пропорциональной (слагаемое 1), дифференциальной (слагаемое 2), и интегральной (слагаемое 3).
Пропорциональная составляющая зависит от текущей ошибки Ei и компенсирует текущую ошибку пропорционально ее величине.
Дифференциальная составляющая зависит от скорости изменения ошибки ∆Ei / ∆tизм и компенсирует резкие возмущения.
Интегральная составляющая накапливает ошибку регулирования, что позволяет ПИД-регулятору поддерживать нулевую ошибку в установившемся режиме (устраняет статическую ошибку управления).
Обычно ПИД-регулятор имеет дополнительные параметры помимо трех коэффициентов (Xp, Ти, Тд). Рассмотрим их более подробно на примере скриншота меню параметров ПИД-регулятора прибора “ ”.
| Рис. 1 |
 |
Каналов (выходов) ПИД-регулирования в приборе может быть несколько и параметры для каждого из них свои собственные. Поэтому выберите желаемый канал в первой графе.
Источником обратной связи с объекта управления (текущая контролируемая величина) может быть любой измерительный канал прибора, поэтому необходимо выбрать желаемый измерительный канал в графе ВЛАДЕЛЕЦ.
ПИД-регулятор может управлять как по закону прямой логики (управление печью), так и по обратному закону (управление хладоустановкой). Выберите желаемую логику работы.
Уставка (SP) - это желаемая величина, на которую регулятор должен выйти в установившемся режиме.
Xp - зона пропорциональности. Задается в единицах контролируемой величины (для терморегулятора в градусах). Зона пропорциональности называется так, потому что только в ней ((SP - Xp)…(SP + Xp)) пропорциональная составляющая ПИД-регулятора может формировать мощность выходного сигнала управления пропорционально ошибке. А за ее пределами мощность будет равна либо 0%, либо 100%. Таким образом, чем уже эта зона, тем быстрее отклик регулятора, но слишком высокое быстродействие может ввести систему в автоколебательный режим.
Ти - постоянная времени интегрирования.
Тд - постоянная времени дифференцирования.
Текущая мощность - это информационный параметр.
Минимальная и максимальная мощность определяют границы мощности выхода ПИД-регулятора.
Аварийная мощность - это такая мощность, которая формируется регулятором при неисправности датчика или измерительного канала. Так можно обеспечить отрицательную температуру холодильной камеры или не дать остыть печи даже при аварийной ситуации.
Последним параметром идет период ШИМ. Этот параметр один для всех ПИД-регуляторов, т.к. каналы ШИМ синхронизированы между собой от одного таймера. ШИМ сигнал позволяет регулировать мощность посредством регулировки скважности сигнала (регулируется ширина импульса при постоянной частоте модуляции). Разрядность ШИМ (число позиций мощности) равна 8192 дискреты (13 бит). Период ШИМ (от 1 мс до 250 сек). Этот параметр зависит от типа и коммутационных способностей силовых исполнительных ключей (м.б. реле, пускатель, твердотельное реле, симистор). Чем выше частота коммутации (чем меньше период) тем больше тепловые потери в ключах (квадратичная зависимость потерь от частоты) и больше износ механических коммутаторов, но лучше качество регулирования. Важно найти золотую середину.
Настройка пропорциональной компоненты (Xp)
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, постоянная интегрирования устанавливается максимально возможной (Ти = макс), а постоянная дифференцирования минимально возможной (Тд = 0). Устанавливается безопасная величина уставки, равная (0,7…0,9)×SP, где SP - это реальная уставка настраиваемой системы. Зона пропорциональности устанавливается минимально возможной (Xp = 0).
В этом случае регулятор выполняет функции двухпозиционного релейного регулятора с гистерезисом равным нулю. Регистрируется переходная характеристика.
| Рис. 2 |
 |
Тο - начальная температура в системе;
Тsp - заданная температура (уставка);
∆T - размах колебаний температуры;
∆t - период колебаний температуры.
Установить зону пропорциональности равной размаху колебаний температуры: Xp = ∆T. Это значение служит
первым приближением для зоны пропорциональности.
Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис. 3.
| Рис. 3 |
 |
Переходная характеристика типа 1: Значение зоны пропорциональности очень мало, переходная характеристика далека от оптимальной. Зону пропорциональности следует значительно увеличить.
Переходная характеристика типа 2: В переходной характеристике наблюдаются затухающие колебания (5 - 6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика типа 3: В переходной характеристике наблюдаются небольшой выброс (перерегулирование) и быстро затухающие колебания (1 - 2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика типа 4: Температура плавно подходит к установившемуся значению без выбросов и колебаний. Этот тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5: Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Настройка дифференциальной компоненты (Tд)
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует пропустить этот этап.
На предыдущем этапе была задана зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис. 3, кривая 2, рис. 4, кривая 1.).
| Рис. 4 |
 |
Следует установить постоянную времени дифференцирования Тд так, чтобы переходная характеристика имела вид кривой 2 на рис. 4. В качестве первого приближения постоянная времени дифференцирования делается равной Тд = 0,2×∆t.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис. 3). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Настройка интегральной компоненты (Ти)
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на следующем рисунке, кривая 1.
| Рис. 5 |
 |
Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины Ти = ∆t.
Переходная характеристика типа 2: Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым.
Переходная характеристика типа 4: Получается при слишком малой величине постоянной времени интегрирования. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3: Оптимальная.
Использованные источники информации
- Сабинин Ю.А. Ковчин С.А. “Теория электропривода”
- Шрейнер Р. Т. “Системы подчиненного регулирования электроприводов”
- Олссон, Пиани “Цифровые системы автоматизации и управления”
- Материалы сайта www.asu-tp.org