Повышающий понижающий преобразователь напряжения dc. Простенький регулируемый DC-DC преобразователь, или лабораторный блок питания своими руками V2
Это DC-DC преобразователь напряжения с 5-13 В на входе, до 12 В выходного постоянного тока 1,5 А. Преобразователь получает меньшее напряжение и дает более высокое на выходе, чтобы использовать там где есть напряжение меньшее требуемых 12 вольт. Часто он используется для увеличения напряжения имеющихся батареек. Это по сути интегральный DC-DC конвертер. Для примера: есть литий-ионный аккумулятор 3,7 В, и его напряжение с помощью данной схемы можно изменить, чтобы обеспечить необходимые 12 В на 1,5 А.
Преобразователь легко построить самостоятельно. Основным компонентом является микросхема MC34063, которая состоит из источника опорного напряжения (температурно-компенсированного), компаратора, генератора с активным контуром ограничения пикового тока, вентиля (элемент "И"), триггера и мощного выходного ключа с драйвером и требуется только несколько дополнительных электронных компонентов в обвязку для того чтобы он был готов. Эта серия микросхем была специально разработана, чтобы включены их в состав различных преобразователей.

Достоинства микросхемы MC34063A
- Работа от 3 до 40 В входа
- Низкий ток в режиме ожидания
- Ограничение тока
- Выходной ток до 1,5 A
- Выходное напряжение регулируемое
- Работа в диапазоне частот до 100 кГц
- Точность 2%

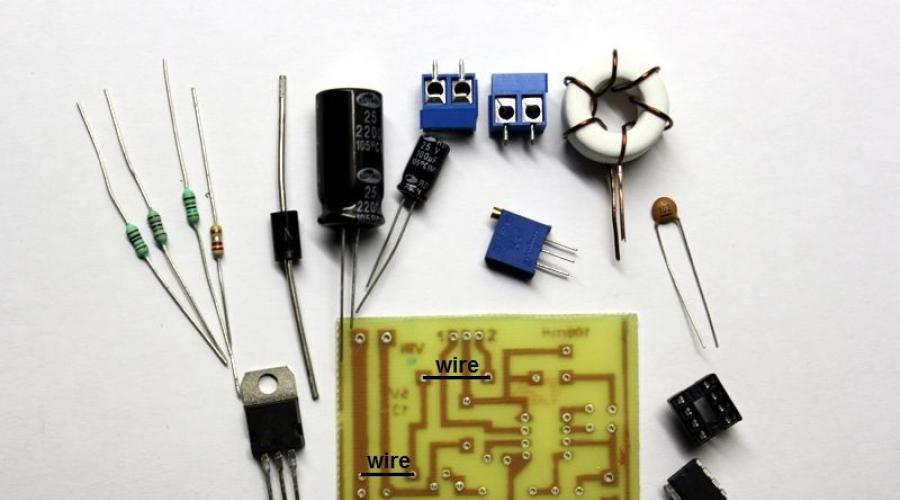
Описание радиоэлементов
- R - Все резисторы 0,25 Вт.
- T - TIP31-NPN силовой транзистор. Весь выходной ток проходит через него.
- L1 - 100 мкГн ферритовые катушки. Если придётся делать самостоятельно, нужно приобрести тороидальные ферритовые кольца наружным диаметром 20 мм и внутренним диаметром 10 мм, тоже 10 мм высотой и проволоку 1 - 1,5 мм толщиной на 0,5 метра, и сделать 5 витков на равных расстояниях. Размеры ферритового кольца не слишком критичны. Разница в несколько (1-3 мм) приемлема.
- D - диод Шоттки должен быть использован обязательно
- TR - многовитковый переменный резистор, который используется здесь для точной настройки выходного напряжения 12 В.
- C - C1 и C3 полярные конденсаторы, поэтому обратите внимание на это при размещении их на печатной плате.


Список деталей для сборки
- Резисторы: R1 = 0.22 ом x1, R2 = 180 ом x1, R3 = 1,5 K x1, R4 = 12K x1
- Регулятор: TR1 = 1 кОм, многооборотный
- Транзистор: T1 = TIP31A или TIP31C
- Дроссель: L1 = 100 мкГн на ферритовом кольце
- Диод: D1 - шоттки 1N5821 (21V - 3A), 1N5822 (28V - 3A) или MBR340 (40В - 3A)
- Конденсаторы: C1 = 100 мкФ / 25V, C2 = 0.001 мкФ, C3 = 2200 мкФ / 25V
- Микросхема: MC34063
- Печатная плата 55 x 40 мм

Заметим, что необходимо установить небольшой алюминиевый радиатор на транзистор T1 - TIP31, в противном случае этот транзистор может быть поврежден из-за повышенного нагрева, особенно на больших токах нагрузки. Даташит и рисунок печатной платы
Входные напряжения до 61 В, выходные напряжения от 0.6 В, выходные токи до 4 А, возможность внешней синхронизации и настройки частоты, а также подстройки тока ограничения, подстройка времени плавного запуска, комплексные защиты нагрузки, широкий рабочий диапазон температур – все эти особенности современных источников питания достижимы при помощи новой линейки DC/DC-преобразователей производства .
В настоящий момент номенклатура микросхем импульсных регуляторов производства компании STMicro (рисунок 1) позволяет создавать источники питания (ИП) со входными напряжениями до 61 В и выходными токами до 4 А.

Задача преобразования напряжения не всегда проста. Каждое конкретное устройство предъявляет свои требования к регулятору напряжения. Иногда главную роль играет цена (потребительская электроника), габариты (портативная электроника), эффективность (устройства с батарейным питанием) или даже скорость разработки изделия. Эти требования зачастую противоречат друг другу. По этой причине не существует идеального и универсального преобразователя напряжения.
В настоящее время применяется несколько типов преобразователей: линейные (стабилизаторы напряжения), импульсные DC/DC-преобразователи, схемы с переносом заряда и даже источники питания на гальванических изоляторах.
Однако наиболее распространенными остаются линейные регуляторы напряжения и понижающие импульсные DC/DC-преобразователи. Основное отличие функционирования этих схем видно из названия. В первом случае силовой ключ работает в линейном режиме, во втором – в ключевом. Основные достоинства, недостатки и области применения этих схем приведены ниже.
Особенности работы линейного регулятора напряжения
Принцип работы линейного регулятора напряжения хорошо известен. Классический интегральный стабилизатор μA723 был разработан еще в 1967 году Р. Видларом. Несмотря на то, что электроника с тех пор ушла далеко вперед, принципы функционирования остались практически неизменными .
Стандартная схема линейного регулятора напряжения состоит из ряда основных элементов (рисунок 2): силового транзистора VT1, источника опорного напряжения (ИОН), схемы компенсационной обратной связи на операционном усилителе (ОУ). Современные регуляторы могут содержать дополнительные функциональные блоки: схемы защиты (от перегрева, от перегрузки по току), схемы управления питанием и др.

Принцип работы таких стабилизаторов достаточно прост. Схема обратной связи на ОУ сравнивает величину опорного напряжения с напряжением выходного делителя R1/R2. На выходе ОУ формируется рассогласование, определяющее напряжение «затвор-исток» силового транзистора VT1. Транзистор работает в линейном режиме: чем больше напряжение на выходе ОУ, тем меньше напряжение «затвор-исток», и тем больше сопротивление VT1.
Такая схема позволяет компенсировать все изменения входного напряжения. Действительно, предположим, что входное напряжение Uвх увеличилось. Это вызовет следующую цепочку изменений: Uвх увеличилось → Uвых увеличится → напряжение на делителе R1/R2 возрастет → выходное напряжение ОУ увеличится → напряжение «затвор-исток» уменьшится → сопротивление VT1 увеличится → Uвых уменьшится.
В результате при изменении входного напряжения выходное напряжение меняется незначительно.
При уменьшении выходного напряжения происходят обратные изменения значений напряжений.
Особенности работы понижающего DC/DC-преобразователя
Упрощенная схема классического понижающего DC/DC-преобразователя (преобразователь I типа, buck-converter, step-down converter) состоит из нескольких основных элементов (рисунок 3): силового транзистора VT1, схемы управления (СУ), фильтра (Lф-Cф), обратного диода VD1 .

В отличие от схемы линейного регулятора транзистор VT1 работает в ключевом режиме.
Цикл работы схемы состоит из двух фаз: фазы накачки и фазы разряда (рисунки 4…5).

В фазе накачки транзистор VT1 открыт и через него протекает ток (рисунок 4). Происходит запасание энергии в катушке Lф и конденсаторе Сф.

В фазе разряда транзистор закрыт, ток через него не протекает. Катушка Lф выступает в качестве источника тока. VD1 – диод, который необходим для протекания обратного тока.
В обеих фазах к нагрузке прикладывается напряжение, равное напряжению на конденсаторе Сф.
Приведенная схема обеспечивает регулирование выходного напряжения при изменении длительности импульса:
Uвых = Uвх × (tи/T)
Если величина индуктивности мала, ток разряда через индуктивность успевает достичь нуля. Такой режим называют режимом прерывистых токов. Он характеризуется увеличением пульсаций тока и напряжения на конденсаторе, что приводит к ухудшению качества выходного напряжения и росту шумов схемы. По этой причине режим прерывистых токов используется редко.
Существует разновидность схемы преобразователя, в которой «неэффективный» диод VD1 заменен на транзистор. Этот транзистор открывается в противофазе с основным транзистором VT1. Такой преобразователь называется синхронным и имеет больший КПД.
Достоинства и недостатки схем преобразования напряжений
Если бы одна из приведенных схем обладала абсолютным превосходством, то вторую бы благополучно забыли. Однако этого не происходит. Это значит, что обе схемы имеют преимущества и недостатки. Анализ схем стоит проводить по широкому кругу критериев (таблица 1).
Таблица 1. Преимущества и недостатки схем регуляторов напряжения
| Характеристика | Линейный регулятор | Понижающий DC/DC-преобразователь |
| Типовой диапазон входных напряжений, В | до 30 | до 100 |
| Типовой диапазон выходных токов | сотни мА | единицы А |
| КПД | низкий | высокий |
| Точность установки выходного напряжения | единицы % | единицы % |
| Стабильность выходного напряжения | высокая | средняя |
| Генерируемый шум | низкий | высокий |
| Сложность схемной реализации | низкая | высокая |
| Сложность топологии ПП | низкая | высокая |
| Стоимость | низкая | высокая |
Электрические характеристики. Для любого преобразователя основными характеристиками являются КПД, ток нагрузки, диапазон входного и выходного напряжений.

Значение КПД для линейных регуляторов невелико и обратно пропорционально входному напряжению (рисунок 6). Это связано с тем, что все «лишнее» напряжение падает на транзисторе, работающем в линейном режиме. Мощность транзистора выделяется в виде тепла. Низкий КПД приводит к тому, что диапазон входных напряжений и выходных токов линейного регулятора относительно невелики: до 30 В и до 1 А.
КПД импульсного регулятора значительно выше и меньше зависит от входного напряжения. При этом не редкостью являются входные напряжения более 60 В и нагрузочные токи более 1 А.
Если используется схема синхронного преобразователя, в котором неэффективный обратный диод заменен транзистором, то КПД будет еще выше.
Точность и стабильность выходного напряжения. Линейные стабилизаторы могут иметь чрезвычайно высокую точность и стабильность параметров (доли процента). Зависимость выходного напряжения от изменения входного и от тока нагрузки не превышает единиц процентов.
Импульсный регулятор по принципу функционирования изначально имеет те же источники погрешности, что и линейный регулятор. Кроме того, на отклонение выходного напряжения может существенно сказываться величина протекающего тока.
Шумовые характеристики. Линейный регулятор обладает умеренной шумовой характеристикой. Существуют низкошумящие прецизионные регуляторы, используемые в высокоточной измерительной технике.
Импульсный стабилизатор сам по себе является мощным источником помех, так как силовой транзистор работает в ключевом режиме. Генерируемые помехи делятся на кондуктивные (передающиеся по линиям питания) и индуктивные (передаются через непроводящие среды).
От кондуктивных помех избавляются при помощи фильтров нижних частот. Чем выше рабочая частота преобразователя, тем проще избавиться от помех. В измерительных схемах импульсный регулятор часто используют совместно с линейным стабилизатором. В этом случае уровень помех значительно сокращается.
Избавиться от вредного воздействия индуктивных помех гораздо сложнее. Эти помехи возникают в катушке индуктивности и передаются по воздуху и непроводящим средам. Для их устранения используют экранированные индуктивности, катушки на тороидальном сердечнике. При разводке платы применяют сплошную заливку полигоном земли и/или даже выделяют отдельный слой земли в многослойных платах. Кроме того, сам импульсный преобразователь максимально удаляется от измерительных схем.
Эксплуатационные характеристики. С точки зрения простоты схемной реализации и разводки печатной платы линейные регуляторы предельно просты. Кроме самого интегрального стабилизатора требуется всего пара конденсаторов.
Импульсный преобразователь потребует как минимум внешнего L-C-фильтра. В ряде случаев требуется внешний силовой транзистор и внешний обратный диод. Это приводит к необходимости расчетов и моделирования, а топология печатной платы существенно усложняется. Дополнительное усложнение платы происходит из-за требования к ЭМС.
Стоимость. Очевидно, что в силу большого количества внешних компонентов импульсный преобразователь будет иметь большую стоимость.
В качестве вывода можно определить преимущественные области применения обоих типов преобразователей:
- линейные регуляторы могут применяться в маломощных низковольтных схемах с высокими точностью, стабильностью и требованиями к малым уровням шумов. Примером могут быть измерительные и прецизионные схемы. Кроме того, малые габариты и низкая стоимость итогового решения могут идеально подойти для портативной электроники и бюджетных устройств.
- импульсные регуляторы идеально подойдут для мощных низко- и высоковольтных схем в автомобильной, промышленной и бытовой электронике. Высокий КПД зачастую делает использование DC/DC безальтернативным для портативных устройств и устройств с батарейным питанием.
Иногда возникает необходимость использовать линейные регуляторы при высоких входных напряжениях. В таких случаях можно воспользоваться стабилизаторами производства компании STMicroelectronics, обладающими рабочими напряжениями более 18 В. (таблица 2).
Таблица 2. Линейные регуляторы STMicroelectronics с высоким входным напряжением
| Наименование | Описание | Uвх макс, В | Uвых ном, В | Iвых ном, А | Собственное падение, В |
| 35 | 5, 6, 8, 9, 10, 12, 15 | 0.5 | 2 | ||
| Прецизионный регулятор на 500 мА | 40 | 24 | 0.5 | 2 | |
| регулятор на 2 А | 35 | 0.225 | 2 | 2 | |
| , | Подстраиваемый регулятор | 40 | – | 0.1; 0.5; 1.5 | 2 |
| регулятор на 3 А | 20 | – | 3 | 2 | |
| Прецизионный регулятор на 150 мА | 40 | – | 0.15 | 3 | |
| KFxx | 20 | 2.5: 8 | 0.5 | 0.4 | |
| Регулятор со сверхнизким собственным падением | 20 | 2.7: 12 | 0.25 | 0.4 | |
| Регулятор на 5 А с низким собственным падением и подстройкой выходного напряжения | 30 | – | 1.5; 3; 5 | 1.3 | |
| LExx | Регулятор со сверхнизким собственным падением | 20 | 3; 3.3; 4.5; 5; 8 | 0.1 | 0.2 |
| Регулятор со сверхнизким собственным падением | 20 | 3.3; 5 | 0.1 | 0.2 | |
| Регулятор со сверхнизким собственным падением | 40 | 3.3; 5 | 0.1 | 0.25 | |
| регулятор на 85 мА с низким собственным падением | 24 | 2.5: 3.3 | 0.085 | 0.5 | |
| Прецизионный регулятор отрицательного напряжения | -35 | -5; -8; -12; -15 | 1.5 | 1.1; 1.4 | |
| Регулятор отрицательного напряжения | -35 | -5; -8; -12; -15 | 0.1 | 1.7 | |
| Подстраиваемый регулятор отрицательного напряжения | -40 | – | 1.5 | 2 |
Если принято решение о построении импульсного ИП, то следует выбрать подходящую микросхему преобразователя. Выбор осуществляется с учетом ряда основных параметров.
Основные характеристики понижающих импульсных DC/DC-преобразователей
Перечислим основные параметры импульсных преобразователей.
Диапазон входных напряжений (В). К сожалению, всегда есть ограничение не только на максимальное, но и на минимальное входное напряжение. Значение этих параметров всегда выбирается с некоторым запасом.
Диапазон выходных напряжений (В). В силу ограничения на минимальную и максимальную длительность импульса, диапазон значений выходного напряжения ограничен.
Максимальный выходной ток (А). Данный параметр ограничивается целым рядом факторов: максимальной допустимой рассеиваемой мощностью, конечным значением сопротивления силовых ключей и др.
Частота работы преобразователя (кГц). Чем выше частота преобразования, тем проще произвести фильтрацию выходного напряжения. Это позволяет бороться с помехами и снижать значения номиналов элементов внешнего L-C-фильтра, что приводит к увеличению выходных токов и к уменьшению габаритов. Однако рост частоты преобразования увеличивает потери на переключение силовых ключей и увеличивает индуктивную составляющую помех, что явно нежелательно.
КПД (%) является интегральным показателем эффективности и приводится в виде графиков для различных значений напряжений и токов.
Остальные параметры (сопротивление каналов интегральных силовых ключей (мОм), собственный ток потребления (мкА), тепловое сопротивление корпуса и др.) являются менее важными, но их также следует учитывать.
Новые преобразователи производства компании STMicroelectronics имеют высокие входное напряжение и КПД, и их параметры могут быть рассчитаны при помощи бесплатной программы eDesignSuite.
Линейка импульсных DC/DC от ST Microelectronics
Портфолио DC/DC STMicroelectronics постоянно расширяется. Новые микросхемы преобразователей имеют расширенный диапазон входных напряжений до 61 В ( / ), высокие выходные токи, выходные напряжения от 0.6 В ( / / ) (таблица 3).
Таблица 3. Новые DC/DC STMicroelectronics
| Характеристики | Наименование | |||||||
| L7987; L7987L | ||||||||
| Корпус | VFQFPN-10L | HSOP-8; VFQFPN-8L; SO8 | HSOP-8; VFQFPN-8L; SO8 | HTSSOP16 | VFQFPN-10L; HSOP 8 | VFQFPN-10L; HSOP 8 | HSOP 8 | HTSSOP 16 |
| Входное напряжение Uвх, В | 4.0…18 | 4.0…18 | 4.0…18 | 4…38 | 4.5…38 | 4.5…38 | 4.5…38 | 4.5…61 |
| Выходной ток, А | 4 | 3 | 4 | 2 | 2 | 3 | 3 | 2 (L7987L); 3 (L7987) |
| Диапазон выходных напряжений, В | 0.8…0.88×Uвх | 0.8…Uвх | 0.8…Uвх | 0.85…Uвх | 0.6…Uвх | 0.6…Uвх | 0.6…Uвх | 0.8…Uвх |
| Рабочая частота, кГц | 500 | 850 | 850 | 250…2000 | 250…1000 | 250…1000 | 250…1000 | 250…1500 |
| Внешняя синхронизация частоты (макс), кГц | нет | нет | нет | 2000 | 1000 | 1000 | 1000 | 1500 |
| Функции | Плавный старт; защита от перегрузки по току; защита от перегрева | |||||||
| Дополнительные функции | ENABLE; PGOOD | ENABLE | LNM; LCM; INHIBIT; защита от перегрузки по напряжению | ENABLE | PGOOD; защита от провалов напряжения; подстройка тока отсечки | |||
| Диапазон рабочих температур кристалла, °C | -40…150 | |||||||
Все новые микросхемы импульсных преобразователей имеют функции плавного старта, защиты от перегрузки по току и перегрева.
Для питания различной электронной аппаратуры весьма широко используются DC/DC преобразователи. Применяются они в устройствах вычислительной техники, устройствах связи, различных схемах управления и автоматики и др.
Трансформаторные блоки питания
В традиционных трансформаторных блоках питания напряжение питающей сети с помощью трансформатора преобразуется, чаще всего понижается, до нужного значения. Пониженное напряжение и сглаживается конденсаторным фильтром. В случае необходимости после выпрямителя ставится полупроводниковый стабилизатор.
Трансформаторные блоки питания, как правило, оснащаются линейными стабилизаторами. Достоинств у таких стабилизаторов не менее двух: это маленькая стоимость и незначительное количество деталей в обвязке. Но эти достоинства съедает низкий КПД, поскольку значительная часть входного напряжения используется на нагрев регулирующего транзистора, что совершенно неприемлемо для питания переносных электронных устройств.
DC/DC преобразователи
Если питание аппаратуры осуществляется от гальванических элементов или аккумуляторов, то преобразование напряжения до нужного уровня возможно лишь с помощью DC/DC преобразователей.
Идея достаточно проста: постоянное напряжение преобразуется в переменное, как правило, с частотой несколько десятков и даже сотен килогерц, повышается (понижается), а затем выпрямляется и подается в нагрузку. Такие преобразователи часто называются импульсными.
В качестве примера можно привести повышающий преобразователь из 1,5В до 5В, как раз выходное напряжение компьютерного USB. Подобный преобразователь небольшой мощности продается на Алиэкспресс.
Рис. 1. Преобразователь 1,5В/5В
Импульсные преобразователи хороши тем, что имеют высокий КПД, в пределах 60..90%. Еще одно достоинство импульсных преобразователей широкий диапазон входных напряжений: входное напряжение может быть ниже выходного или намного выше. Вообще DC/DC конвертеры можно разделить на несколько групп.
Классификация конвертеров
Понижающие, по английской терминологии step-down или buck
Выходное напряжение этих преобразователей, как правило, ниже входного: без особых потерь на нагрев регулирующего транзистора можно получить напряжение всего несколько вольт при входном напряжении 12…50В. Выходной ток таких преобразователей зависит от потребности нагрузки, что в свою очередь определяет схемотехнику преобразователя.
Еще одно англоязычное название понижающего преобразователя chopper. Один из вариантов перевода этого слова - прерыватель. В технической литературе понижающий конвертер иногда так и называют «чоппер». Пока просто запомним этот термин.
Повышающие, по английской терминологии step-up или boost
Выходное напряжение этих преобразователей выше входного. Например, при входном напряжении 5В на выходе можно получить напряжение до 30В, причем, возможно его плавное регулирование и стабилизация. Достаточно часто повышающие преобразователи называют бустерами.
Универсальные преобразователи - SEPIC
Выходное напряжение этих преобразователей удерживается на заданном уровне при входном напряжении как выше входного, так и ниже. Рекомендуется в случаях, когда входное напряжение может изменяться в значительных пределах. Например, в автомобиле напряжение аккумулятора может изменяться в пределах 9…14В, а требуется получить стабильное напряжение 12В.
Инвертирующие преобразователи - inverting converter
Основной функцией этих преобразователей является получение на выходе напряжения обратной полярности относительно источника питания. Очень удобно в тех случаях, когда требуется двухполярное питание, например .
Все упомянутые преобразователи могут быть стабилизированными или нестабилизированными, выходное напряжение может быть гальванически связано с входным или иметь гальваническую развязку напряжений. Все зависит от конкретного устройства, в котором будет использоваться преобразователь.
Чтобы перейти к дальнейшему рассказу о DC/DC конвертерах следует хотя бы в общих чертах разобраться с теорией.
Понижающий конвертер чоппер - конвертер типа buck
Его функциональная схема показана на рисунке ниже. Стрелками на проводах показаны направления токов.

Рис.2. Функциональная схема чопперного стабилизатора
Входное напряжение Uin подается на входной фильтр - конденсатор Cin. В качестве ключевого элемента используется транзистор VT, он осуществляет высокочастотную коммутацию тока. Это может быть либо . Кроме указанных деталей в схеме содержится разрядный диод VD и выходной фильтр - LCout, с которого напряжение поступает в нагрузку Rн.
Нетрудно видеть, что нагрузка включена последовательно с элементами VT и L. Поэтому схема является последовательной. Как же происходит понижение напряжения?
Широтно-импульсная модуляция - ШИМ
Схема управления вырабатывает прямоугольные импульсы с постоянной частотой или постоянным периодом, что в сущности одно и то же. Эти импульсы показаны на рисунке 3.

Рис.3. Импульсы управления
Здесь tи время импульса, транзистор открыт, tп - время паузы, - транзистор закрыт. Соотношение tи/T называется коэффициентом заполнения duty cycle, обозначается буквой D и выражается в %% или просто в числах. Например, при D равном 50% получается, что D=0,5.
Таким образом D может изменяться от 0 до 1. При значении D=1 ключевой транзистор находится в состоянии полной проводимости, а при D=0 в состоянии отсечки, попросту говоря, закрыт. Нетрудно догадаться, что при D=50% выходное напряжение будет равно половине входного.
Совершенно очевидно, что регулирование выходного напряжения происходит за счет изменения ширины управляющего импульса tи, по сути дела изменением коэффициента D. Такой принцип регулирования называется (PWM). Практически во всех импульсных блоках питания именно с помощью ШИМ производится стабилизация выходного напряжения.
На схемах, показанных на рисунках 2 и 6 ШИМ «спрятана» в прямоугольниках с надписью «Схема управления», которая выполняет некоторые дополнительные функции. Например, это может быть плавный запуск выходного напряжения, дистанционное включение или защита преобразователя от короткого замыкания.
Вообще конвертеры получили столь широкое применение, что фирмы производители электронных компонентов наладили выпуск ШИМ контроллеров на все случаи жизни. Ассортимент настолько велик, что просто для того чтобы их перечислить понадобится целая книга. Поэтому собирать конвертеры на дискретных элементах, или как часто говорят на «рассыпухе», никому не приходит в голову.
Более того готовые конвертеры небольшой мощности можно купить на Алиэкспрес или Ebay за незначительную цену. При этом для установки в любительскую конструкцию достаточно припаять к плате провода на вход и выход, и выставить требуемое выходное напряжение.
Но вернемся к нашему рисунку 3. В данном случае коэффициент D определяет, сколько времени будет открыт (фаза 1) или закрыт (фаза 2) . Для этих двух фаз можно представить схему двумя рисунками. На рисунках НЕ ПОКАЗАНЫ те элементы, которые в данной фазе не используются.

Рис.4. Фаза 1
При открытом транзисторе ток от источника питания (гальванический элемент, аккумулятор, выпрямитель) проходит через индуктивный дроссель L, нагрузку Rн, и заряжающийся конденсатор Cout. При этом через нагрузку протекает ток, конденсатор Cout и дроссель L накапливают энергию. Ток iL ПОСТЕПЕННО ВОЗРАСТАЕТ, сказывается влияние индуктивности дросселя. Эта фаза называется накачкой.
После того, как напряжение на нагрузке достигнет заданного значения (определяется настройкой устройства управления), транзистор VT закрывается и устройство переходит ко второй фазе - фазе разряда. Закрытый транзистор на рисунке не показан вовсе, как будто его и нет. Но это означает лишь то, что транзистор закрыт.

Рис.5. Фаза 2
При закрытом транзисторе VT пополнения энергии в дросселе не происходит, поскольку источник питания отключен. Индуктивность L стремится воспрепятствовать изменению величины и направления тока (самоиндукция) протекающего через обмотку дросселя.
Поэтому ток мгновенно прекратиться не может и замыкается через цепь «диод-нагрузка». Из-за этого диод VD получил название разрядный. Как правило, это быстродействующий диод Шоттки. По истечении периода управления фаза 2 схема переключается на фазу 1, процесс повторяется снова. Максимальное напряжение на выходе рассмотренной схемы может быть равным входному, и никак не более. Чтобы получить выходное напряжение больше, чем входное, применяются повышающие преобразователи.
Пока только следует напомнить собственно о величине индуктивности, которая определяет два режима работы чоппера. При недостаточной индуктивности преобразователь будет работать в режиме разрывных токов, что совершенно недопустимо для источников питания.
Если же индуктивность достаточно большая, то работа происходит в режиме неразрывных токов, что позволяет с помощью выходных фильтров получить постоянное напряжение с приемлемым уровнем пульсаций. В режиме неразрывных токов работают и повышающие преобразователи, о которых будет рассказано ниже.
Для некоторого повышения КПД разрядный диод VD заменяется транзистором MOSFET, который в нужный момент открывается схемой управления. Такие преобразователи называются синхронными. Их применение оправдано, если мощность преобразователя достаточно велика.
Повышающие step-up или boost преобразователи
Повышающие преобразователи применяются в основном при низковольтном питании, например, от двух-трех батареек, а некоторые узлы конструкции требуют напряжения 12…15В с малым потреблением тока. Достаточно часто повышающий преобразователь кратко и понятно называют словом «бустер».

Рис.6. Функциональная схема повышающего преобразователя
Входное напряжение Uin подается на входной фильтр Cin и поступает на последовательно соединенные L и коммутирующий транзистор VT. В точку соединения катушки и стока транзистора подключен диод VD. К другому выводу диода подключены нагрузка Rн и шунтирующий конденсатор Cout.
Транзистор VT управляется схемой управления, которая вырабатывает сигнал управления стабильной частоты с регулируемым коэффициентом заполнения D, так же, как было рассказано чуть выше при описании чопперной схемы (Рис.3). Диод VD в нужные моменты времени блокирует нагрузку от ключевого транзистора.
Когда открыт ключевой транзистор правый по схеме вывод катушки L соединяется с отрицательным полюсом источника питания Uin. Нарастающий ток (сказывается влияние индуктивности) от источника питания протекает через катушку и открытый транзистор, в катушке накапливается энергия.
В это время диод VD блокирует нагрузку и выходной конденсатор от ключевой схемы, тем самым предотвращая разряд выходного конденсатора через открытый транзистор. Нагрузка в этот момент питается энергией накопленной в конденсаторе Cout. Естественно, что напряжение на выходном конденсаторе падает.
Как только напряжение на выходе станет несколько ниже заданного, (определяется настройками схемы управления), ключевой транзистор VT закрывается, и энергия, запасенная в дросселе, через диод VD подзаряжает конденсатор Cout, который подпитывает нагрузку. При этом ЭДС самоиндукции катушки L складывается с входным напряжением и передается в нагрузку, следовательно, напряжение на выходе получается больше входного напряжения.
По достижении выходным напряжением установленного уровня стабилизации схема управления открывает транзистор VT, и процесс повторяется с фазы накопления энергии.
Универсальные преобразователи - SEPIC (single-ended primary-inductor converter или преобразователь с несимметрично нагруженной первичной индуктивностью).
Подобные преобразователи применяются в основном, когда нагрузка имеет незначительную мощность, а входное напряжение изменяется относительно выходного в большую или меньшую сторону.

Рис.7. Функциональная схема преобразователя SEPIC
Очень похожа на схему повышающего преобразователя, показанного на рисунке 6, но имеет дополнительные элементы: конденсатор C1 и катушку L2. Именно эти элементы и обеспечивают работу преобразователя в режиме понижения напряжения.
Преобразователи SEPIC применяются в тех случаях, когда входное напряжение изменяется в широких пределах. В качестве примера можно привести 4V-35V to 1.23V-32V Boost Buck Voltage Step Up/Down Converter Regulator. Именно под таким названием в китайских магазинах продается преобразователь, схема которого показана на рисунке 8 (для увеличения нажмите на рисунок).

Рис.8. Принципиальная схема преобразователя SEPIC
На рисунке 9 показан внешний вид платы с обозначением основных элементов.
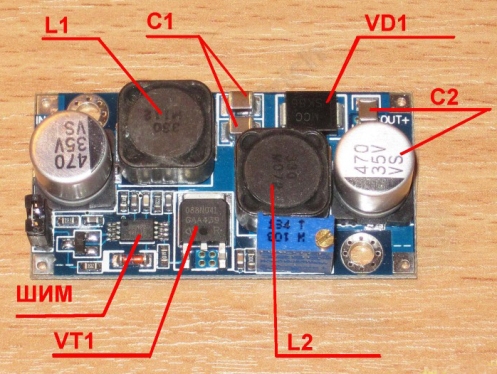
Рис.9. Внешний вид преобразователя SEPIC
На рисунке показаны основные детали в соответствии с рисунком 7. Следует обратить внимание на наличие двух катушек L1 L2. По этому признаку можно определить, что это именно преобразователь SEPIC.
Входное напряжение платы может быть в пределах 4…35В. При этом выходное напряжение может настраиваться в пределах 1,23…32В. Рабочая частота преобразователя 500КГц.При незначительных размерах 50 x 25 x 12мм плата обеспечивает мощность до 25 Вт. Максимальный выходной ток до 3А.
Но тут следует сделать замечание. Если выходное напряжение установить на уровне 10В, то выходной ток не может быть выше 2,5А (25Вт). При выходном напряжении 5В и максимальном токе 3А мощность составит всего 15Вт. Здесь главное не перестараться: либо не превысить максимально допустимую мощность, либо не выйди за пределы допустимого тока.
Импульсные преобразователи и силовая электроника в целом, всегда оставались чем-то сакральным для большинства любителей и профессионалов в области разработки электроники. В статье освещается пожалуй самая интересная тема в среде DIY-щиков и фанатов альтернативной энергетики - формирование синусоидального напряжения/тока из постоянного.
Думаю многие из вас наверняка видели рекламу, либо читали статьи, где была фраза «чистый синус». Вот именно о нем и пойдет речь, но не о маркетинговой составляющей, а о исключительно технической реализации. Я постараюсь максимально понятно рассказать о самих принципах работы, о стандартных (и не очень) схемотехнических решениях и самое главное - напишем и разберем ПО для микроконтроллера STM32, которое и сформирует нам необходимые сигналы.
Почему STM32? Да потому, что сейчас это самый популярный МК в СНГ: по ним много обучающей русскоязычной информации, есть куча примеров, а главное эти МК и средства отладки для них - очень дешевые. Скажу прямо - в коммерческом проекте я бы поставил только TMS320F28035 или подобный DSP из серии Piccolo от TI, но это уже совсем другая история.
Важно одно - STM32 позволяет стабильно управлять простыми «бытовыми» силовыми преобразователями от которых не зависит судьба мира работа какой-нибудь АЭС или ЦОДа.
Вот такую картину управляющих сигналов необходимо получить, чтобы превратить ток постоянный в переменный. И да - тут именно синус! Как в том фильме: «Видишь суслика? - Нет. - А он есть...»
Интересно узнать каким образом формируется синус? Хочется узнать как все-таки качают нефть киловатты энергии? Тогда добро пожаловать под кат!
1. Топологии для формирования синусоидального сигнала
Если спросить у толпы электронщиков: «Как можно сформировать синусоидальный сигнал?», то посыпятся предложения с десятком различных методов, но какой нужен нам? Давайте оттолкнемся от изначальной задачи - нам нужно превратить, например, 380В 10А в переменное напряжение 230В. В общем это «классический» случай, его мы можете увидеть в любом хорошем on-line UPS или инверторе. Получается нам надо преобразовать мощность около 4 кВт да еще и с хорошим КПД, не слабо, да? Я думаю подобное условие поубавит количество вариантов «рисования» синуса. Так что же нам остается?В силовых преобразователях до 6-10 кВт применяется две основные топологии: полный мост и «полумост» со сквозной нейтралью. Выглядят они следующим образом :
1) Топология со сквозной нейтралью

Данная топология очень чаще всего встречается в бюджетных ИБП с синусом на выходе, хотя и такие авторитеты как APC и GE не брезгуют применять ее даже на достаточно больших мощностях. Что же их побуждает к этому? Давайте рассмотрим достоинства и недостатки данной топологии.
Плюсы:
- Минимально возможное количество силовых транзисторов, а значит потери в 2 раза меньши и стоимость устройства тоже ниже
- Сквозной ноль. Это упрощает процесс сертификации, особенно CE и ATEX. Связано это с тем, что сквозной ноль позволяет системам защиты по входу (например, УЗО) срабатывать так же при возникновение аварии в выходных цепях после преобразователя
- Простая топология, что позволяем максимально уменьшить стоимость изделия при мелко-
и средне серийном производстве
Минусы:
- Необходимость двухполярного источника питания. Как видите на схему инвертора надо подавать ±380В и еще ноль
- Удвоенное количество высоковольтных конденсаторов. Высоковольтные конденсаторы большой емкости и с малым ESR на мощностях от 3-4 кВт начинают составлять от 20 до 40%
стоимости компонентов - Применение электролитических конденсаторов в «делителе». Они сохнут, подобрать конденсаторы с одинаковыми параметрами практически нереально, а если учесть, что параметры электролитов меняются в процессе эксплуатации, то и бессмысленно. Заменить на пленку можно, но дорого
2) Мостовая топология

Мостовая топология… наверное самая понятная и самая распространенная топология в силовых преобразователях, а главное доступная разработчикам даже с небольшим опытом. После 10 кВт вы не встретите ничего другого кроме моста одно- или трехфазного. За что же его так любят?
Плюсы:
- Очень высокая надежность. Она в основном обусловлена качеством системы управления силовыми транзисторами и не зависит от деградации компонентов
- Входная емкость требуется в разы, а то и на порядок меньше. Необходимо лишь обеспечить расчетное значение ESR. Это позволяет использовать пленочные конденсаторы при сохранение себестоимости. Пленочные конденсаторы - не сохнут, лучше ведут в суровых температурах, рабочий ресурс на порядок выше, чем у электролитов
- Минимальные пульсации напряжения на транзисторах, а значит можно применить транзисторы на меньшее напряжение
- Простота и понятность алгоритмов работы. Это приводит к значительному уменьшению времени на разработку изделия, а также на его пуско-наладочные работы
Минусы:
- Увеличенное количество силовых транзисторов, а значит необходимо более серьезное охлаждение. Увеличение цены на транзисторах, но за счет меньшего количества конденсаторов это скорее даже плюс
- Повышенная сложность драйвера, особенно при требованиях к наличию гальванической развязки
В 70% случаев мне приходится применять мостовую схему не только в DC/AC инверторах, но и в других преобразователях. Это связано с тем, что проектирую в основном промышленные решения и все чаще для европейских заказчиков, а там принято на дорогие промышленные устройства давать гарантию 5-15 лет. Классическое требование: «Хотим железку, чтобы можно было давать гарантию 10 лет», тут уже выбирать не приходится. Конечно, когда люди хотят устройство с минимальной ценой, то тут необходимо уже отталкиваться от конкретной задачи при выборе топологии.
Небольшой итог : в данной статье будет приведено ПО для работы мостового преобразователя (Н-мост или Full Bridge), но сам принцип формирования синуса одинаковый для всех топологий. Код можно будет также адаптировать и под 1-ю топологию, но это вы уже сами.
2. Формирование переменного тока с помощью мостового преобразователя
Для начала давайте разберем как вообще работает мостовой преобразователь. Смотрим на схемку и видим транзисторы VT1-VT4. Они позволяют нам подавать на нашу абстрактную нагрузку (резистор, например) тот или иной потенциал. Если мы откроем транзисторы VT1 и VT4, то получится следующее: VT4 один конец нагрузки подключит к минусу (GND), а транзистор VT1 подключит к +380В, на нагрузке появится разность потенциалов «380В - 0В», которая не равна нулю, а значит через нагрузку начнет протекать ток. Я думаю все помнят, что ученые договорились - ток протекает «от плюса к минусу». Получаем такую картину:
Что мы получили открыв VT1 и VT4? Мы подключили нашу нагрузку к сети! Если резистор заменить на лампочку, то он она бы просто загорелась. И еще мы не просто включили нагрузку, а определили направление тока, протекающего через нее. Это очень важно! А что было в это время с VT2 и VT3? Они были закрыты… совсем… намертво… Что будет если все таки VT2 или VT3 были так же открыты? Смотрим:

Предположим, что открылись транзисторы VT1, VT4 и VT2. Вспоминаем закон Ома, смотрим сопротивление канала у высоковольтных транзисторов, например, IPP60R099P7XKSA1 и видим 0.1 Ом, у нас их 2 последовательно - значит сопротивление цепи VT1 и VT2 у нас около 0.2 Ом. Теперь посчитаем ток, которые пойдет через эту цепь: 380В / 0.2 Ом = 1900А. Думаю всем понятно, что это КЗ? Так же думаю всем понятно почему VT2 и VT3 должны быть закрыты?
Данный «феномен» называется - сквозной ток . И именно с ним идет большая война в силовой электронике. Как его избежать? Создать систему управления, алгоритм которой будет жестко запрещать одновременной открытие лишнего транзистора.
Зачем же нужны тогда транзисторы VT2 и VT3? Помните я писал, что очень важно направление тока? Давайте вспомнит что такое переменные ток. Собственно это ток, который имеет что-то переменное, в данном случае направление тока. У нас в розетке протекает ток, который меняет свое направление 100 раз в секунду. Давайте теперь закроем VT1 и VT4, а затем откроем транзисторы VT2 и VT3 и получим такую картину:

Как видите направление тока (обозначено стрелками) изменилось на противоположное. Использование моста позволило нам менять направление тока, о чем это говорит? Да, мы получили переменный ток!
Прошу обратить внимание, что у моста есть как бы 2 диагонали: первая диагональ образована VT1+VT4, а вторая диагональ образована с помощью VT2+VT3. Данные диагонали работают по очереди, коммутирую ток сначала в одну сторону, а потом в другую.
Вот мы получили переменный ток, скажите вы, но не все так просто… У нас есть стандарт - сетевое напряжение. Оно нормируется двумя основными параметрами: напряжение и частота. Давайте пока разберемся с частотой, ибо вопрос напряжения простой и чисто схемотехнический.
И так частота… что о ней известно - она 50 Гц (бывает 60Гц в Штатах). Период сигнала равен 20 мс. Синусоида штука симметричная в данном случае, а значит наши 2 полуволны (положительная и отрицательная) имеют одинаковую длительность, то есть 10 мс + 10 мс. Надеюсь тут все понятно.
Что это значит в физическом смысле? Да то, что нам нужно менять направление тока в нагрузке каждые 10 мс. Получаем, что сначала у нас открыта 10 мс диагональ VT1+VT4, а затем она закрывается и на следующие 10 мс открывается диагональ VT2+VT3.
Что значит открыть транзистор и какой сигнал на него подавать
Давайте отвлечемся немного на принцип управления транзисторами. Я использую полевые N-канальные транзисторы с изолированным затвором (Mosfet).
«Открытый транзистор» - это транзистор, на затвор (G) которого подали положительный потенциал (+10..18В) относительно истока (S) и транзистор изменил сопротивление канала (S-D) с бесконечно большого (2-100 МОм) на малое (обычно 0.1 - 1 Ом). То есть транзистор начал проводить ток.
«Закрытый транзистор» - это транзистор, затвор (G) которого подтянули к истоку (S) и его сопротивление изменилось с маленького до бесконечно большого. То есть транзистор перестал проводить ток.
Для лучше ознакомления с принципом работы полевого транзистора или IGBT - советую вам прочитать пару глав в книге Семенова «Основы силовой электроники» или другой источник, можно и википедию для начала.
Для управления мы подаем сигнал с Широтно-Импульсной Модуляцией или более привычная аббревиатура - ШИМ. Особенность данного сигнала в том, что у него есть 2 состояния: нижнее напряжение (GND) и верхнее напряжение (VCC), то есть подавая его на затвор транзистора мы или открываем его или закрываем - иного не дано. Про ШИМ тоже советую почитать дополнительно, ибо я вам описал для ленивых поверхностно.
И так, для того, чтобы у нас мост менял направление тока каждые 10 мс нам нужно подать на него ШИМ сигнал, период которого равен 20 мс, а скважность 50%. Это значит, что у нас из 20 мс плечо половину времени (10 мс) открыто и проводит ток, а другую половину закрыто. Подавать такой ШИМ нам надо на все ключи, но с одним условием - на диагональ VT1+VT4 мы подаем прямой ШИМ, а на диагональ VT2+VT3 уже инверсный. Если говорить более по-умному, то сигнал, подаваемый на диагонали должен иметь сдвиг 180 0 . Я думаю в этот момент у вас голова закипела в попытках понять текст, поэтому смотрим на его визуальное представление:

Теперь все понятно? Нет? Тогда подробнее… Как видите я отметил специально моменты открытия и закрытия транзисторов: открываются на «плюсе» и закрываются на «минусе». Также сигналы противоположны, то есть инверсные: когда синий сигнал «плюс», то зеленый сигнал «минус». Синий сигнал мы подаем на один на одну диагональ, а зеленый сигнал на другую - как видно на осциллограмме, наши диагонали никогда не открываются одновременно. Переменный ток готов!
Смотри на период. Специально показал осциллограмму с выходов контроллера, чтобы мои слова не были абстракцией. Период сигнала составляет 20 мс, одна диагональ открыта 10 мс и создает положительную полуволну, другая диагональ так же открывается на 10 мс и создает уже отрицательную полуволну. Теперь надеюсь всем понятно, а кто и сейчас не понял - пишите в ЛС, проведу для вас индивидуальное занятие на пальцах. В подтверждение моих слов осциллограмма показывает наши заветные 50 Гц! Только расслабляться рано…
Мы получили переменный ток с частотой 50 Гц, но в розетке у нас синусода, а тут меандр - не дело. Формально можно подавать меандр на выход и питать им большинство нагрузок, например, импульсному блоку питанию все равно: синус или меандр. То есть для включения ноутбуков, телефонов, телевизоров, телефонов и прочего вам уже хватит, но если вы подключите двигатель переменного тока, то все будет очень плохо - он начнет греться и КПД его ощутимо меньше, а в итоге скорее всего сгорит. Вы думаете у вас нет двигателей дома? А компрессор холодильника? А циркулярный насос отопления? Последние вообще горят как будто из дерева сделаны. Такая же ситуация с глубинными насосами для скважин, да и вообще много с чем. Получается, что синусоидальный сигнал на выходе инвертора, стабилизатора или ИБП все таки бывает важен. Что же - надо его создать! Сейчас начнется совсем взрыв мозга…
3. Формирование синусоидальной формы сигнала с помощью ШИМ
Если говорить откровенно, то я не знаю как данный раздел преподнести на доступном языке. Вдруг кто не поймет, то прошу вас или погуглить дополнительно, или написать в комментарии или ЛС - попытаюсь персонально вам объяснить. Глаза боятся, а руки делают…Давайте посмотрим как выглядит обычный график синуса:

Видим 2 оси: одна ось с периодом пи, пи/2 и далее, вторая с амплитудой от -1 до +1. В нашей задаче период измеряется в секундах и составляет 20 мс или 10 мс на каждую полуволну. Тут все просто и понятно, а вот с амплитудой веселее - просто примите как аксиому, что амплитуда у нас от 0 до 1000. Это значение скважности, которую устанавливает микроконтроллер, то есть 100 - это 10%, 500 - 50%, 900 - 90%. Логика думаю понятна. В следующей главе вы поймете почему от 0 до 1000, а пока перестроим наш график под наши значения:

Вот так выглядит график синуса курильщика, который соответствует нашей задачи. Как видите отрицательный полупериод я не обозначил, т.к. у нас он реализуется не с помощью синусоидального сигнала, а с помощью изменения направления тока переключением диагоналей моста.
По оси Х у нас время, а по оси Y скважность нашего ШИМ-сигнала. Нам нужно нарисовать синус с помощью ШИМа. Вспоминаем геометрию в школе, как мы строили графики? Правильно, по точкам! А сколько точек? Давайте построим синус по нескольким точкам О1(0,0) + О2(5,1000) + О3(10,0) + О4(15, -1000) + О5(20, 0) и получаем такой синус:

Построили и видим, что в принципе данный сигнал больше похож на синус чем обычный меандр, но это все равно не синус пока что. Давайте увеличим количество точек. Это кстати называется «дискретность сигнала» или в данном случае «дискретность ШИМа». А как узнать координаты этих точек? С крайними то просто было…
Расчет значений для формирования синуса
Как выше я говорил - синус у нас вполне себе симметричный. Если мы построим 1/4 периода, то есть от 0 до 5 мс, то дублируя этот кусок дальше - мы можем строить синус бесконечно долго. И так формула:
И так по порядку:
- n - значение скважности в данной дискретной точке
- A - амплитуда сигнала, то есть максимальное значение скважности. У нас это 1000
- pi/2 - 1/4 периода синуса попадает в pi/2, если считаем 1/2 периода, то pi
- x - номер шага
- N - количество точек

Получаем шаг дискретизации 1 мс. Формулу для вычисления скважности оформим, например, в excel и получим следующую таблицу:

Теперь вернется к нашему графику синуса и построим его снова, но уже для большего количества точек и посмотрим как он изменится:

Как видим сигнал куда больше похож на синус, даже с учетом моего мастерства в рисовании, а точнее в уровне лени)) Я думаю результат не требует объяснений? По результатам построения выведем аксиому:
Чем больше точек, чем выше дискретизация сигнала, тем идеальнее форма синусоидального сигнала
И так, сколько же точек будем использовать… Понятно, что чем больше, тем лучше. Как посчитать:
- Использую для статьи старенький микроконтроллер STM32F100RBT6 (отладка STM32VL-Discovery), его частота 24 МГц.
- Считаем сколько тактов будет длиться период 20 мс: 24 000 000 Гц / 50 Гц = 480 000 тиков
- Значит половина периода длится 240 000 тиков, что соответствует частоте 24 кГц. Хотите повысить несущую частоту - берите камень шустрее. 24 кГц наши уши все таки услышат, но для тестов или железки, стоящей в подвале пойдет. Чуть позже я планирую перенести на F103C8T6, а там уже 72 МГц.
- 240 000 тиков… Тут логично напрашивается 240 точек на половину периода. Таймер будет обновлять значение скважности каждые 1000 тиков или каждые 41,6 мкс

Исходник таблицы и значений можно взять по ссылке - .
4. Управление мостовым преобразователем для формирования синуса
Мы получили таблицу синуса и что с ней делать? Нужно передавать эти значения с определенным шагом дискретизации, который у нас известен. Все начинается с того, что таймер инициализировался - время 0, скважность ноль. Далее мы отсчитываем шаг дискретизации 41,66 мкс и записываем в таймер значение ШИМа из таблицы 13 (0,13%), отсчитываем еще 41,66 мкс и записываем 26 (0,26%) и так далее все 240 значений. Почему 240? У нас 120 шагов на 1/4 периода, а нам надо нарисовать 1/2 периода. Значения скважности те же, только после того как они достигли 1000 мы записываем ее в обратной последовательность и получаем спад синуса. На выходе мы будем иметь вот такую осциллограмму:
Как видите мы получили кучу значений ШИМа в четко заданном периоде и его длительность составляет: 240 шагов х 41,66(!) мкс = 9998,4 мкс = 9,9984 мс ~ 10 мс. Мы получили половину периода для частоты сети 50 Гц. Сигнала как видите опять два и они в противофазе, как раз то, что нужно для управления диагоналями моста. Но позвольте, где же синус спросите вы? Настал момент истины! Давайте теперь сигнал с выхода микроконтроллера подадим на ФНЧ, я сделал простой ФНЧ на RC-цепочки с номиналами 1,5 кОм и 0,33 мкФ (под рукой просто были) и получил такой результат:

Вуаля! Вот он наш долгожданный синус! Красный луч осциллографа - это сигнал до ФНЧ, а желтый луч - сигнал уже после фильтрации. ФНЧ обрезал все частоты выше 321 Гц. У нас остался основной сигнал 50 Гц, ну и конечно его гармоники с небольшой амплитудой. Если хотите идеально очистить сигнал, то сделайте ФНЧ с частотой среза около 55-60 Гц, но пока это не важно, нам надо было лишь проверить получился ли у нас синус или нет. Кстати… у меня синхронизация осциллографа включена по желтому лучу (стрелка справа экрана) и мы видим внизу экрана его частоту - идеальные 50 Гц. Что еще можно пожелать? Пожалуй все, осталось определиться какой сигнал и куда подавать. Давайте рассмотрим такую картинку:

Если вы обратите на саааамую первую осциллограмму в статье, то увидите, что сигнал в желтом и синем лучше имеют одинаковую фазу, то есть они в одно время становятся положительными и открывают транзисторы. Эти 2 сигнала открывают диагональ VT1+VT4. Соответственно 2 других сигнала так же имеют одинаковую фазу и открывают другую диагональ. Теперь мы не просто меняем направление тока, но и задаем амплитуду с помощью ШИМ таким образом, чтобы она изменялась по синусоидальному закону. Теперь рассмотрим эту же схемку, но уже с токами:

Как видим ток через нагрузку протекает в противоположную сторону, меняя направление с частотой 50 Гц, а модулированный ШИМ, подаваемый на транзисторы VT1 и VT2 позволяет нарисовать синусоидальную форму сигнала на полуволнах.
ФНЧ (фильтр низкой частоты) выполнен на индуктивности L1 и конденсаторе C2. Частоту среза для данного фильтра советую считать менее 100 Гц, это позволит минимизировать пульсации напряжения по выходу.
На десерт покажу часть схемы реального устройства с подобной топологией и фильтром, она большая, поэтому скачиваем PDF-ку .
5. Борьба со сквозными токами
Я думаю не для кого не секрет, что нет ничего идеального? Тоже самое и с Mosfet-ами, у них есть ряд недостатков и мы рассмотрим один из них - большая емкость затвора. То есть, чтобы нам открыть транзистор надо не просто подать напряжение, но и этим самым напряжением зарядить конденсатор, поэтому фронт и спад сигнала затягивается. Это приводит к тому, что на границе сигналов может возникать момент времени, когда один транзистор еще полностью не закрылся, а другой уже начал открываться.Подробнее о данном явление советую почитать, например, в этой статье . Я лишь расскажу как с ним бороться. Чтобы транзисторы успели нормально закрыться до открытия следующего плеча между управляющими сигналами вводят dead-time или проще говоря - временную задержку. У нас такая задержка будет введена между управляющими сигналами на транзисторах VT3 и VT4, т.к. именно они обеспечивают коммутацию полуволн. На транзисторах с модулируемым ШИМом (VT1 и VT2) такие задержки уже есть - синус начинается со скважности 0% и заканчивается тоже 0%. Эта задержка длиной в 1 шаг дискретизации, то есть 41.6 мкс.
И так - надо реализовать мертвое время между синим и зеленым лучом/сигналом. На любом контроллере такую задержку можно сделать программным способом, но это не есть хорошо - программа подвиснет или задержится и пыщ-пыщ ваше устройство и квартира уже объяты огнем. Поэтому в силовой электронике стоит применять только аппаратные средства. На всех специализированных motor control аппаратный deadtime предусмотрен на всех выходах ШИМа и каналах, но STM32 это все таки МК общего назначения, поэтому тут все проще, но нашу функцию он выполнит.
Нам понадобится таймер TIM1, только он умеет вставлять аппаратную задержку между сигналами, в разделе про написание ПО я расскажу как это сделать, а сейчас смотрим на результат и на то, что вообще должно быть:

Чтобы увидеть задержку «растягиваем» сигнал на осциллографе, т.к. он имеет небольшую длительность около 300 нс. Необходимое время длительности deadtime необходимо рассчитывать для каждой конкретной задачи, чтобы защитить транзисторы от сквозных токов. Длительность задержки настраивается при иннициализации (настройке) таймера TIM1. Данная задержка присутствует и на фронте и на спаде сигнала.
6. Написание встроенного ПО для микроконтроллера STM32
Вот мы и подошли наверное к самой важной и интересной части. Физику процесса мы разобрали, принцип работы вроде понятен, необходимый минимум защит тоже определен - осталось только все это реализовать в реальном железе. Для этого я использую платку STM32VL-Discovery, получил ее кстати еще в 2011 году во времена, когда ST раздавали отладки бесплатно на своих конференциях и с тех пор она лежала запакованная - открыл упаковку всего пару месяцев назад, вроде срок годности не прошел))) Выглядит мой «стенд» для написание кода вот так:
Теперь пройдемся по подключению. Так как мне необходимо формировать два сигнала с разной частотой, то пришлось задействовать выходы ШИМ на разных таймерах. TIM1 формирует сигнал, который задает основную частоту 50 Гц и подает их на транзисторы VT3 и VT4. Используется канал ШИМа №3 + его комплементарный выход. Да да, в STM32 аппаратный deadtime можно настроить только между обычным и комплементарным выходом одного канала, что мне сильно не понравилось. Сам процесс формированию синуса передан таймеру TIM2, тут уже не нужна задержка (ранее писал почему) и он вполне сгодится для формирование модулированного сигнала на VT1 и VT2.
Используемые выходы:
- PA10 - обычный выход ШИМ, канал №3 таймера TIM1, который генерирует 50 Гц на транзистор VT3
- PB15 - комплементарный выход канала №3 таймера TIM1, который подается на транзистор VT4
- PA0 - выход ШИМ канала №1 таймера TIM2. Подает модулированный сигнал на VT1
- PA1 - выход ШИМ канала №2 таймера TIM2. Подает модулированный сигнал на VT2
Некоторые наверняка спросят: «А почему не задействовать DMA?» Сделать это можно и нужно, но данная статья носит скорее ознакомительный характер, да и сам МК не делает ничего сложного в плане вычислений, поэтому в производительность ядра тут точно не упереться. DMA - это хорошо, но без DMA можно обойтись без каких-либо потенциальных проблем. Давайте уточним, что нам нужно сделать в программе:
- Создать массив с нашими 240 точками синуса
- Настроить цепи тактирования на частоту 24 МГц, выбрав источник внешний кварцевый резонатор
- Настроить таймер TIM1 на генерацию ШИМ 50 Гц с включенным deadtime
- Настроить TIM2 на генерацию ШИМ с несущей частотой 24 кГц
- Настроить таймер TIM6, который генерирует прерывания с частотой 24 кГц. В нем мы будем отправлять следующее значение скважности из таблицы в таймер TIM2, а также чередовать генерацию полуволн
6.1. Создание таблицы синуса
Тут все просто, обычный массив. Единственное, что стоит помнить - у нас 120 точек от 0 до 1000. Нам нужно добавить в таблицу еще 120 точек, но в обратной последовательности:Uint16_t sin_data = {13,26,39,52,65,78,91,104,117,130,143,156,169,182,195,207,220,233,246,258, 271,284,296,309,321,333,346,358,370,382,394,406,418,430,442,453,465,477,488,500, 511,522,533,544,555,566,577,587,598,608,619,629,639,649,659,669,678,688,697,707, 716,725,734,743,751,760,768,777,785,793,801,809,816,824,831,838,845,852,859,866, 872,878,884,891,896,902,908,913,918,923,928,933,938,942,946,951,955,958,962,965, 969,972,975,978,980,983,985,987,989,991,993,994,995,996,997,998,999,999,999,1000, 999,999,999,998,997,996,995,994,993,991,989,987,985,983,980,978,975,972,969,965, 962,958,955,951,946,942,938,933,928,923,918,913,908,902,896,891,884,878,872,866, 859,852,845,838,831,824,816,809,801,793,785,777,768,760,751,743,734,725,716,707, 697,688,678,669,659,649,639,629,619,608,598,587,577,566,555,544,533,522,511,500, 488,477,465,453,442,430,418,406,394,382,370,358,346,333,321,309,296,284,271,258, 246,233,220,207,195,182,169,156,143,130,117,104,91,78,65,52,39,26,13};
6.2. Настройка системы тактирования
Настройка тактирования в STM32 весьма гибкая и удобная, но есть несколько нюансов. Сама последовательность выглядит следующим образом:1) Переключаемся на тактирование от встроенной RC-цепочки (HSI) на внешний кварц (HSE), дальше ждем флага о готовности
RCC->CR |= ((uint32_t)RCC_CR_HSEON); // Enable HSE
while (!(RCC->CR & RCC_CR_HSERDY)); // Ready start HSE
2) Flash память контроллера работает несколько медленнее, чем ядро для этого настраиваем тактирование флеши. Если этого не сделать, то программа запустится, но будет периодически падать: пара кВт и нестабильное ПО - вещи несовместимые.
FLASH->ACR = FLASH_ACR_PRFTBE | FLASH_ACR_LATENCY; // Cloclk Flash memory
3) Выставляем делители для системной шины тактирования (AHB) и для шин периферии, коих аж две штуки: APB1 и APB2. Нам нужна максимальная частота, поэтому ничего не делим и коэффициенты деления делаем равными 1.
RCC->CFGR |= RCC_CFGR_HPRE_DIV1; // AHB = SYSCLK/1
RCC->CFGR |= RCC_CFGR_PPRE1_DIV1; // APB1 = HCLK/1
RCC->CFGR |= RCC_CFGR_PPRE2_DIV1; // APB2 = HCLK/1
4) Настраиваем множитель частоты (PLL) предделитель, который стоит перед ним и делит частоту кварца на 2. Получаем, что 8 МГц поделили на 2 и получили 4 МГц. Теперь надо их умножить на 6, чтобы на выходе были 24 МГц. Перед записью регистров предварительно сотрем их содержимое на всякий случай.
RCC->CFGR &= ~RCC_CFGR_PLLMULL; // clear PLLMULL bits
RCC->CFGR &= ~RCC_CFGR_PLLSRC; // clearn PLLSRC bits
RCC->CFGR &= ~RCC_CFGR_PLLXTPRE; // clearn PLLXTPRE bits
RCC->CFGR |= RCC_CFGR_PLLSRC_PREDIV1; // source HSE
RCC->CFGR |= RCC_CFGR_PLLXTPRE_PREDIV1_Div2; // source HSE/2 = 4 MHz
RCC->CFGR |= RCC_CFGR_PLLMULL6; // PLL x6: clock = 4 MHz * 6 = 24 MHz
5) Теперь надо включить множитель частоты (PLL) и дождаться флага о готовности:
RCC->CR |= RCC_CR_PLLON; // enable PLL
while((RCC->CR & RCC_CR_PLLRDY) == 0) {} // wait till PLL is ready
6) И наконец-то настраиваем источник тактирования для системной шины (AHB) выход нашего множителя частоты, на котором заветные 24 МГц. Предварительно содержимое регистра чистим, устанавливаем нужный бит и ждем флага готовности:
RCC->CFGR &= ~RCC_CFGR_SW; // clear SW bits
RCC->CFGR |= RCC_CFGR_SW_PLL; // select source SYSCLK = PLL
while((RCC->CFGR & RCC_CFGR_SWS) != RCC_CFGR_SWS_1) {} // wait till PLL is used
В итоге у нас получается вот такая функция настройки тактирования:
Void RCC_Init (void){ RCC->CR |= ((uint32_t)RCC_CR_HSEON); // Enable HSE while (!(RCC->CR & RCC_CR_HSERDY)); // Ready start HSE FLASH->ACR = FLASH_ACR_PRFTBE | FLASH_ACR_LATENCY; // Cloclk Flash memory RCC->CFGR |= RCC_CFGR_HPRE_DIV1; // AHB = SYSCLK/1 RCC->CFGR |= RCC_CFGR_PPRE1_DIV1; // APB1 = HCLK/1 RCC->CFGR |= RCC_CFGR_PPRE2_DIV1; // APB2 = HCLK/1 RCC->CFGR &= ~RCC_CFGR_PLLMULL; // clear PLLMULL bits RCC->CFGR &= ~RCC_CFGR_PLLSRC; // clearn PLLSRC bits RCC->CFGR &= ~RCC_CFGR_PLLXTPRE; // clearn PLLXTPRE bits RCC->CFGR |= RCC_CFGR_PLLSRC_PREDIV1; // source HSE RCC->CFGR |= RCC_CFGR_PLLXTPRE_PREDIV1_Div2; // source HSE/2 = 4 MHz RCC->CFGR |= RCC_CFGR_PLLMULL6; // PLL x6: clock = 4 MHz * 6 = 24 MHz RCC->CR |= RCC_CR_PLLON; // enable PLL while((RCC->CR & RCC_CR_PLLRDY) == 0) {} // wait till PLL is ready RCC->CFGR &= ~RCC_CFGR_SW; // clear SW bits RCC->CFGR |= RCC_CFGR_SW_PLL; // select source SYSCLK = PLL while((RCC->CFGR & RCC_CFGR_SWS) != RCC_CFGR_SWS_1) {} // wait till PLL is used }
6.3. Настройка таймера TIM1 и «мертвого времени»
Я приведу общую настройку таймера, она подробно описана в reference manual - назначение каждого регистра советую почитать. Да и базовые статьи по работе с ШИМ в интернете есть. Сам код у меня весьма неплохо прокомментирован, поэтому привожу сразу код функции инициализации таймера TIM1, а самые интересные моменты разберем:Void PWM_50Hz_Init (void){
RCC->APB2ENR |= RCC_APB2ENR_TIM1EN; // enable clock for TIM1
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN; // enable clock for port A
RCC->APB2ENR |= RCC_APB2ENR_IOPBEN; // enable clock for port B
RCC->APB2ENR |= RCC_APB2ENR_AFIOEN; // enable clock for alternative gpio
/****************************** Setting PA10 **************************************/
GPIOA->CRH &= ~GPIO_CRH_CNF10; // setting out alternative push-pull for PWM
GPIOA->CRH |= GPIO_CRH_CNF10_1;
GPIOA->CRH &= ~GPIO_CRH_MODE10;
GPIOA->CRH |= GPIO_CRH_MODE10; // gpio speed 50 MHz
/***************************** Setting PB15 ***************************************/
GPIOB->CRH &= ~GPIO_CRH_CNF15; // setting complementary for CH3N
GPIOB->CRH |= GPIO_CRH_CNF15_1;
GPIOB->CRH &= ~GPIO_CRH_MODE15;
GPIOB->CRH |= GPIO_CRH_MODE15; // gpio speed 50 MHz
/************************** Config PWM channel ************************************/
TIM1->PSC = 480-1; // div for clock: F = SYSCLK /
TIM1->ARR = 1000; // count to 1000
TIM1->CR1 &= ~TIM_CR1_CKD; // div for dead-time: Tdts = 1/Fosc = 41.6 ns
TIM1->CCR3 = 500; // duty cycle 50%
TIM1->CCER |= TIM_CCER_CC3E | TIM_CCER_CC3NE; // enable PWM complementary out
TIM1->CCER &= ~TIM_CCER_CC3NP; // active high level: 0 - high, 1 - low
TIM1->CCMR2 &= ~TIM_CCMR2_OC3M;
TIM1->CCMR2 |= TIM_CCMR2_OC3M_2 | TIM_CCMR2_OC3M_1; // positiv PWM
TIM1->BDTR &= ~TIM_BDTR_DTG; // clear register
TIM1->BDTR |= TIM_BDTR_DTG_2 | TIM_BDTR_DTG_1 | TIM_BDTR_DTG_0; // value dead-time
TIM1->BDTR |= TIM_BDTR_MOE | TIM_BDTR_AOE; // enable generation output
/*******************************************************************************/
TIM1->CR1 &= ~TIM_CR1_DIR; // count up: 0 - up, 1 - down
TIM1->CR1 &= ~TIM_CR1_CMS; // aligned on the front signal
TIM1->
Скважность у нас фиксированная и никогда не изменяется, как и частота. Именно этот таймер задает время и последовательность работы диагоналей:
TIM1->CCR3 = 500; // duty cycle 50%
Длительность паузы «мертвого времени» зависит сильно от временной параметра TDTS, которое настраивается тут:
TIM1->CR1 &= ~TIM_CR1_CKD; // div for dead-time: Tdts = 1/Fosc = 41.6 ns
Его длительность составляет 1 тик тактовой частоты. Если посмотреть в reference manual, то можно увидеть, что биты CKD могут, например, сделать Tdts равным 2, 8 тикам и прочее.
Самое же время паузы устанавливается тут:
TIM1->BDTR |= TIM_BDTR_DTG_2 | TIM_BDTR_DTG_1 | TIM_BDTR_DTG_0;
Если отроете reference manual RM0041, то увидите вот такие формулы для расчета DT. Как видите параметр Tdts там основнополагающий:

6.4. Настройка таймера TIM2, формирующий синус
Тут все еще проще, объяснять что-то в настройке наверно нет смысла, ибо комментарии и так избыточны. Если будут вопросы - жду их в комментариях.Void PWM_Sinus_Init (void){ RCC->APB1ENR |= RCC_APB1ENR_TIM2EN; // enable clock for TIM2 RCC->APB2ENR |= RCC_APB2ENR_IOPAEN; // enable clock for port A RCC->APB2ENR |= RCC_APB2ENR_AFIOEN; // enable clock for alternative gpio /****************************** Setting PA0 ***************************************/ GPIOA->CRL &= ~GPIO_CRL_CNF0; // setting out alternative push-pull for PWM1_CH1 GPIOA->CRL |= GPIO_CRL_CNF0_1; GPIOA->CRL &= ~GPIO_CRL_MODE0; GPIOA->CRL |= GPIO_CRL_MODE0; // gpio speed 50 MHz /****************************** Setting PA1 ***************************************/ GPIOA->CRL &= ~GPIO_CRL_CNF1; // setting out alternative push-pull for PWM1_CH1 GPIOA->CRL |= GPIO_CRL_CNF1_1; GPIOA->CRL &= ~GPIO_CRL_MODE1; GPIOA->CRL |= GPIO_CRL_MODE1; // gpio speed 50 MHz /*************************** Config PWM channel ***********************************/ TIM2->PSC = 0; // div for clock: F = SYSCLK / TIM2->ARR = 1000; // count to 1000 TIM2->CCR1 = 0; // duty cycle 0% TIM2->CCR2 = 0; // duty cycle 0% TIM2->CCER |= TIM_CCER_CC1E; // enable PWM out to PA8 TIM2->CCER &= ~TIM_CCER_CC1P; // active high level: 0 - high, 1 - low TIM2->CCER |= TIM_CCER_CC2E; // enable PWM complementary out to PA9 TIM2->CCER &= ~TIM_CCER_CC1P; // active high level: 0 - high, 1 - low TIM2->CCMR1 &= ~(TIM_CCMR1_OC1M | TIM_CCMR1_OC2M); TIM2->CCMR1 |= TIM_CCMR1_OC1M_2 | TIM_CCMR1_OC1M_1 | TIM_CCMR1_OC2M_2 | TIM_CCMR1_OC2M_1; // positiv PWM1_CH1 and PWM1_CH2 /*******************************************************************************/ TIM2->CR1 &= ~TIM_CR1_DIR; // count up: 0 - up, 1 - down TIM2->CR1 &= ~TIM_CR1_CMS; // aligned on the front signal: 00 - front; 01, 10, 11 - center TIM2->CR1 |= TIM_CR1_CEN; // start count }
6.5. Настройка прерываний от таймера TIM6
Настраиваем сам таймер на частоту 24 кГц:Void TIM6_step_init (void){ RCC->APB1ENR |= RCC_APB1ENR_TIM6EN; // enable clock for basic TIM6 TIM6->PSC = 1-1; // div, frequency 24 kHz TIM6->ARR = 1000; // count to 1000 TIM6->DIER |= TIM_DIER_UIE; // enable interrupt for timer TIM6->CR1 |= TIM_CR1_CEN; // start count NVIC_EnableIRQ(TIM6_DAC_IRQn); // enable interrupt TIM6_DAC_IRQn }
6.6. Реализация основного алгоритма управления
Основные события происходят в генерируемом таймером TIM6 прерывании. Прерывание генерируется каждые 41,66 мкс, если помните это наш шаг дискретизации. Соответственно в прерывании записывается значение скважности из таблицы в регистр CCRx . Также в данном прерывании определяется какая диагональ в данный момент времени отрисовывается, путем инверсии флага sin_status после каждого полупериода. Мы выводим 240 точек, инвертируем флаг, что вызывает переход управления к другому каналу, когда уже и он отрисовал, то флаг опять инвертируется и все повторяется. Код основного алгоритма:Void TIM6_DAC_IRQHandler(void){ TIM6->SR &= ~TIM_SR_UIF; if(sin_status == 0){TIM2->CCR1 = sin_data;} if(sin_status == 1){TIM2->CCR2 = sin_data;} sin_step++; if(sin_step >= 240){ sin_step=0; sin_status = sin_status ? 0: 1; } }
Итоги
Скачиваем проект, компилируем и заливаем в ваш микроконтроллер и получаем рабочий инвертор. Вам остается только сделать мост и подавать на него сигналы:
Одну из своих схем моста я чуть ранее выложил в PDF-ке можете пользоваться сколько угодно, надеюсь она вам поможет в освоение силовой электроники.
Надеюсь статья вам понравилась. Если у вас возникли вопросы по применению данного кода в реальном железе, то буду рад ответить на них. Также прошу не воспринимать данный код как что-то готовое, это ядро преобразователя, которое реализует основную функцию. Все «плюшки» и прочую избыточность вы можете добавить сами. Голое ядро проекта позволит вам понять как оно работает и не тратить кучу времени на разборку кода.
Материалы
UPD1: хотелось бы поблагодарить пользователя за ряд найденных ошибок, в основном в таблице синуса - она изменена. Те, кто использовали код или саму таблицу прошу скопировать ее снова, в статье уже исправленный вариант.
Импульсные DC-DC преобразователи предназначены для как для повышения, так и для понижения напряжения. С их помощью можно с минимальными потерями преобразовать 5 вольт, например, в 12, или 24, либо и наоборот. Также существуют высоковольтные DC-DC преобразователи, они способны из относительно малого напряжения (5-12 вольт) получить весьма существенную разность потенциалов в сотни вольт. В этой статье рассмотрим сборку именно такого преобразователя, напряжение на выходе которого можно регулировать в пределах 60-250 вольт.

В её основе лежит распространённый интегральный таймер NE555. Q1 на схеме – полевой транзистор, можно использовать IRF630, IRF730, IRF740 или любые другие, рассчитанные на работу с напряжением выше 300 вольт. Q2 – маломощный биполярный транзистор, смело можно ставить BC547, BC337, КТ315, 2SC828. Дроссель L1 должен иметь индуктивность 100 мкГн, однако, если такого под рукой нет, можно ставить дроссели в пределах 50-150 мкГн, это не скажется на работе схемы. Легко изготовить дроссель самому – намотать 50-100 витков медного провода на ферритовое колечко. Диод D1 по схеме FR105, вместо него можно ставить UF4007 или любой другой быстродействующий диод на напряжение не меньше 300 вольт. Конденсатор С4 обязательно должен быть высоковольтным, как минимум 250 вольт, можно больше. Чем больше будет его ёмкость – тем лучше. Также желательно параллельно ему поставить плёночный конденсатор небольшой ёмкости для качественной фильтрации высокочастотных помех на выходе преобразователя. VR1 – подстроечный резистор, с помощью которого регулируется напряжение на выходе. Минимальное напряжение питания схемы – 5 вольт, самое оптимальное 9-12 вольт.

Изготовление преобразователя
Схема собирается на печатной плате размерами 65х25 мм, файл с рисунком платы к статье прилагается. Можно взять текстолит размером больше, чем сам рисунок, чтобы по краям осталось место для крепления платы в корпусе. Несколько фотографий процесса изготовления:


После травления плату обязательно нужно залудить и проверить на замыкание дорожки. Т.к. на плате присутствует высокое напряжение, между дорожками не должно быть никаких металлических заусенцев, иначе возможен пробой. В первую очередь на плату впаиваются мелкие детали – резисторы, диод, конденсаторы. Затем микросхема (её лучше установить в панельку), транзисторы, подстроечный резистор, дроссель. Для удобства подключения к плате проводов я рекомендую поставить винтовые клеммники, места для них на плате предусмотрены.


Скачать плату:
(cкачиваний: 260)
Первый запуск и настройка
Перед запуском обязательно нужно проверить правильность монтажа, прозвонить дорожки. Подстроечный резистор установить в минимальное положение (движок должен быть на стороне резистора R4). После этого можно подавать на плату напряжение, включив последовательно с ней амперметр. На холостом ходу ток потребления схемы не должен превышать 50 мА. Если он укладывается в норму, можно аккуратно поворачивать подстроечный резистор, контролируя напряжение на выходе. Если всё нормально – подключить к высоковольтному выходу нагрузку, например, резистор 10-20 кОм и ещё раз протестировать работу схемы, уже под нагрузкой.Максимальный ток, который может выдать такой преобразователь составляет примерно 10-15 мА. Использовать его можно, например, в составе ламповой техники для питания анодов ламп, либо же зажигать газоразрядные или люминесцентные индикаторы. Основной вариант применения – миниатюрный электрошокер, ведь напряжение 250 вольт на выходе ощутимо для человека. Удачной сборки!